
Python神器!3D点云数据处理一学就会!
3D点云数据处理:从入门到精通的Python之旅
随着AR、VR技术的快速发展,以及自动驾驶汽车和智能机器人的兴起,3D点云数据处理技术逐渐成为了研究和应用的热点。这一技术不仅能够为现实世界中的物体和场景提供精确的三维表示,还能够为机器赋予更深层次的视觉感知能力。在这篇文章中,我们将一起探索如何使用Python和Open3D库,从入门到精通3D点云数据处理。
一、3D点云数据处理概述
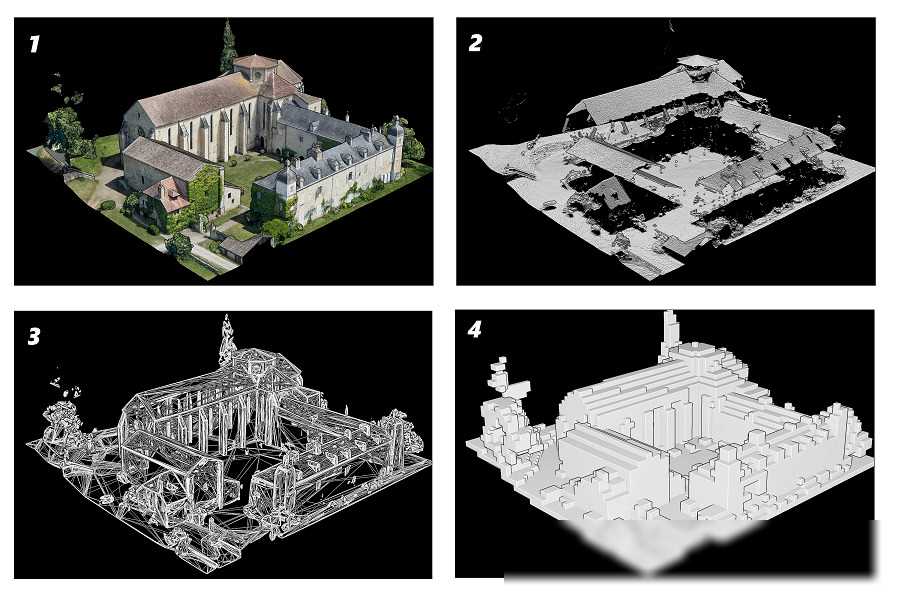
在深入讨论技术细节之前,我们先来了解一下3D点云数据处理的基本概念。简单来说,点云数据就是一系列在三维空间中的点的**,这些点通常通过3D扫描仪、激光雷达等设备获取。点云数据包含了物体表面的大量信息,可以用于三维重建、目标识别、场景理解等多种应用。
二、Open3D:强大的3D数据处理库
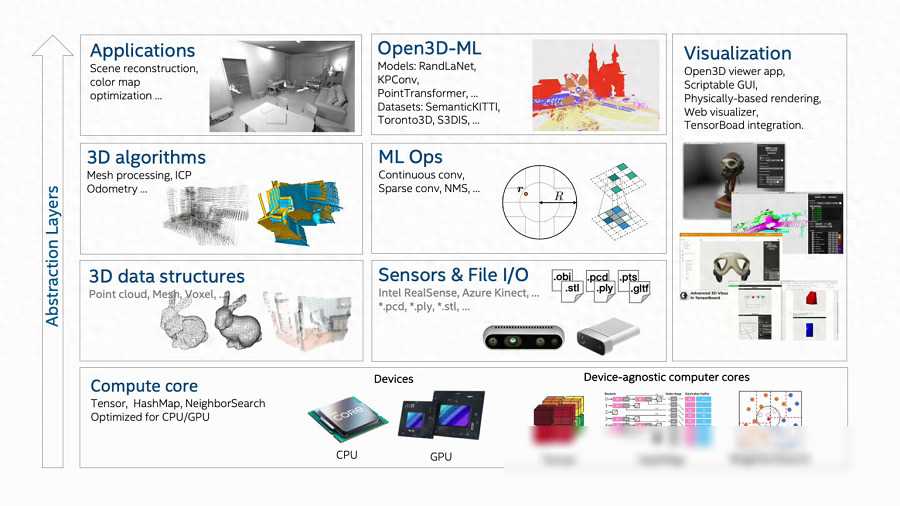
Open3D是一个开源的3D数据处理库,它提供了一系列的功能,用于处理和分析点云数据。这个库不仅支持Python,还支持C++,使得开发人员可以根据自己的需求选择合适的编程语言。Open3D的API设计清晰直观,易于上手,而且它还支持多种3D文件格式,如PLY、PCD、OBJ等。
Open3D的核心功能涵盖了从点云数据的读取、可视化,到点云数据的预处理、分割、特征提取等多个方面。通过Open3D,我们可以轻松地对点云数据进行各种操作,从而实现对现实世界的精确感知和理解。
三、点云数据的获取与处理
点云数据的获取通常通过3D扫描仪或激光雷达等设备实现。这些设备能够快速地获取物体表面的大量点云数据,为我们提供了丰富的信息。原始的点云数据往往存在一些问题,如噪声、离群点、数据冗余等。因此,在进行点云数据处理之前,我们需要对数据进行预处理。
预处理的过程通常包括滤波、降采样、点云分割等步骤。滤波可以去除点云数据中的噪声和离群点,提高数据的质量。降采样可以减少点云数据的数量,降低计算复杂度。点云分割则可以将点云数据划分为不同的区域或对象,便于后续的处理和分析。
四、点云数据的可视化
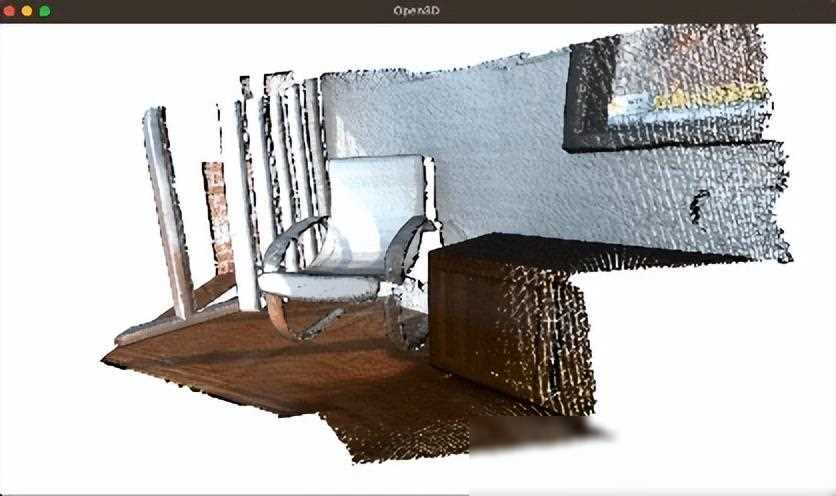
在点云数据处理过程中,可视化是一个非常重要的环节。通过可视化,我们可以直观地观察点云数据的特点和分布,从而更好地理解数据。Open3D提供了丰富的可视化功能,可以方便地将点云数据以三维图形的方式展示出来。

除了基本的点云显示外,Open3D还支持多种可视化效果,如颜色映射、点云渲染等。这些功能可以让我们更加深入地了解点云数据的细节和特征。
五、点云数据的特征提取与应用
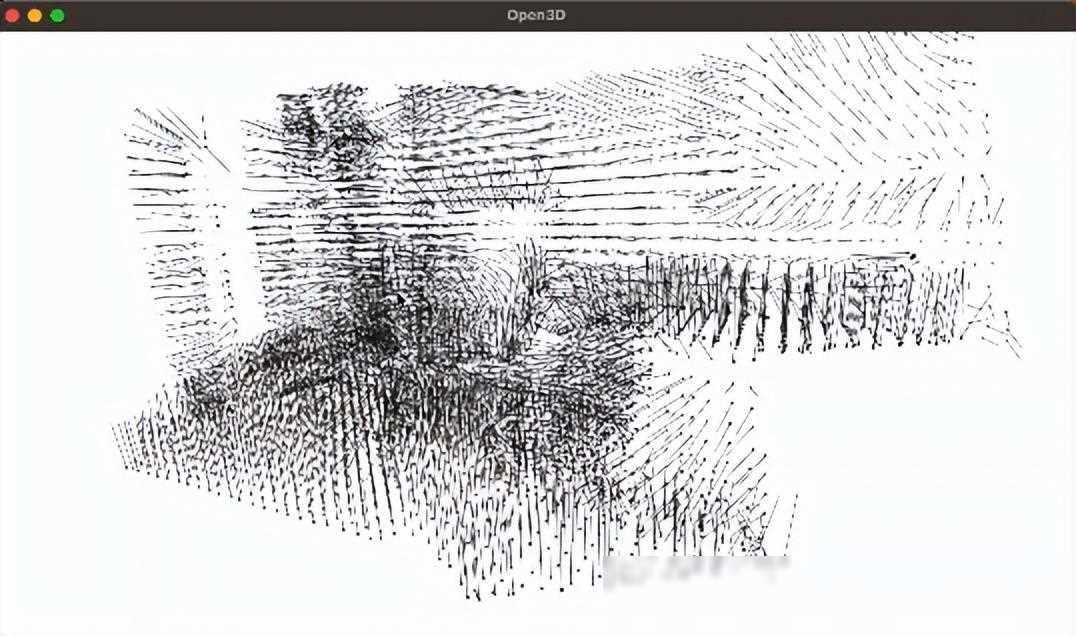
在点云数据处理中,特征提取是一个非常重要的步骤。通过提取点云数据的特征,我们可以更好地理解和描述物体的形状、结构等信息。Open3D提供了一系列的特征提取算法,如法线估计、曲率估计、特征点检测等。
提取出的点云特征可以用于多种应用,如三维重建、目标识别、场景理解等。例如,在自动驾驶汽车中,通过处理激光雷达获取的点云数据,我们可以实现道路障碍物检测、车辆跟踪等功能。在机器人领域,点云数据处理技术也被广泛应用于导航、定位、避障等方面。
六、案例分析:使用Open3D进行点云处理
为了更好地说明如何使用Open3D进行点云处理,我们将通过一个具体的案例来演示整个过程。假设我们有一组通过3D扫描仪获取的点云数据,我们需要对其进行预处理、可视化和特征提取。
我们使用Open3D的API读取点云数据,并进行初步的可视化。通过观察点云数据的特点和分布,我们可以发现数据中存在一些噪声和离群点。接下来,我们使用Open3D提供的滤波算法对点云数据进行预处理,去除噪声和离群点。然后,我们对处理后的点云数据进行降采样和分割操作,以进一步减少数据量和提高处理效率。
在特征提取阶段,我们使用Open3D提供的法线估计和曲率估计算法来提取点云数据的特征。这些特征可以用于后续的三维重建或目标识别等任务。我们将提取出的特征进行可视化展示,以便更好地理解和分析数据。
七、总结与展望
通过本文的介绍和分析,我们可以看到Open3D是一个功能强大的3D数据处理库,它为我们提供了丰富的工具和功能来处理和分析点云数据。使用Open3D和Python进行点云处理不仅简单易学而且功能强大。未来随着3D技术的不断发展和应用领域的不断拓宽相信点云数据处理技术将会发挥更加重要的作用。让我们一起期待这一技术的更多精彩应用吧!