
惊人发现!人形机器人如何实现全身多接触运动?
惊人发现!人形机器人如何实现全身多接触运动?
亲爱的读者朋友们,想象一下,如果人形机器人不仅能像人类一样行走、跑动,还能在狭窄的环境中灵活自如、稳稳地保持平衡,那将是多么令人兴奋的技术突破!今天,我们就一起来深入探讨一下人形机器人在全身多接触运动控制方面的最新研究与应用。
一、引言
人形机器人正逐渐走进我们的生活,从智能家居的助手到医疗行业的护理工作者,这些机器人的广泛应用无疑为人类的生活带来了极大的便利。然而,在一些复杂乃至狭窄的工作环境中,如何让人形机器人稳健地完成工作,成为了一个亟待解决的挑战。传统的运动控制技术主要集中在机器人四肢的末端接触(如手和脚),这就导致了机器人在复杂环境中的灵活性和稳定性不足。
为了突破这个限制,研究者提出了多接触运动的概念,即让机器人的身体各部分(如膝盖、肘部)也参与到运动中。这不仅能够提高机器人的运动能力,更能够在不稳定的环境中保持平衡。这一创新思路吸引了众多研究者的关注,并开启了对全身多接触运动的新一轮探索。接下来,我们将逐一探讨关于多接触运动的定义、现状、研究目标、方法及实验结果。
二、多接触运动的定义与现状
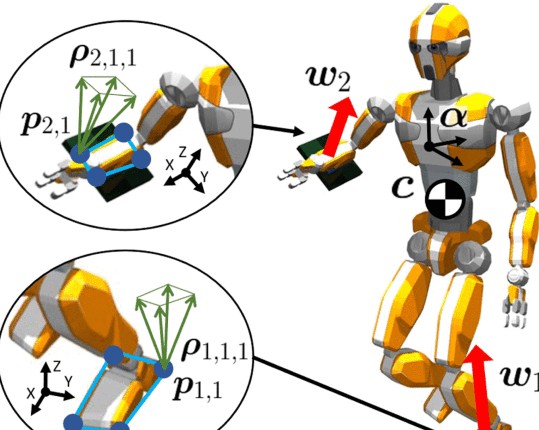
多接触运动界定,可以简单理解为人形机器人能够利用身体的各个部位与环境进行接触并完成运动的能力。这一运动不仅限于机器人的手脚,还包括其肘部、肩部等中间部位。想象一下,如果机器人在攀爬楼梯时,能够利用肘部和膝盖提供支撑,那它的运动稳定性将大大提高。
当前的研究现状表明,尽管已有研究着眼于多接触运动的规划与控制,但大部分技术依然局限在手和脚的接触。根据相关数据显示,现有许多模型的控制技术在遇到动态环境或复杂地形时效果较差,尤其在机器人整体平衡性方面存在显著不足。这不仅使得机器人难以应对突发的干扰,更限制了其应用范围。
为了更深入地理解这一领域,我们需要探讨当前的技术瓶颈与挑战。这包括如何有效整合多个接触点的感知能力与运动控制,以及提升机器人在复杂动态环境中的鲁棒性。只有克服这些困难,人形机器人才能真正实现各项任务的全面能力提升。
三、研究目标与方法
研究目标在于开发一种新的控制方法,使得人形机器人能够实现全身多接触运动,从而在各种复杂环境中保持稳定性和灵活性。为了实现这一目标,研究者们集中在两个核心问题上:如何提升全身接触感知的能力,以及如何在多接触状态下进行有效的平衡控制。
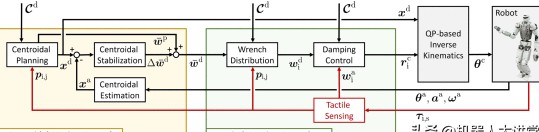
方法概述则主要分为三个部分:首先,利用分布式触觉传感器,以获取机器人全身各接触点的实时信息;其次,建立相应的控制算法来有效结合质心运动控制与肢体运动控制;最后,通过大量的仿真与真实世界实验验证所提出方法的有效性。
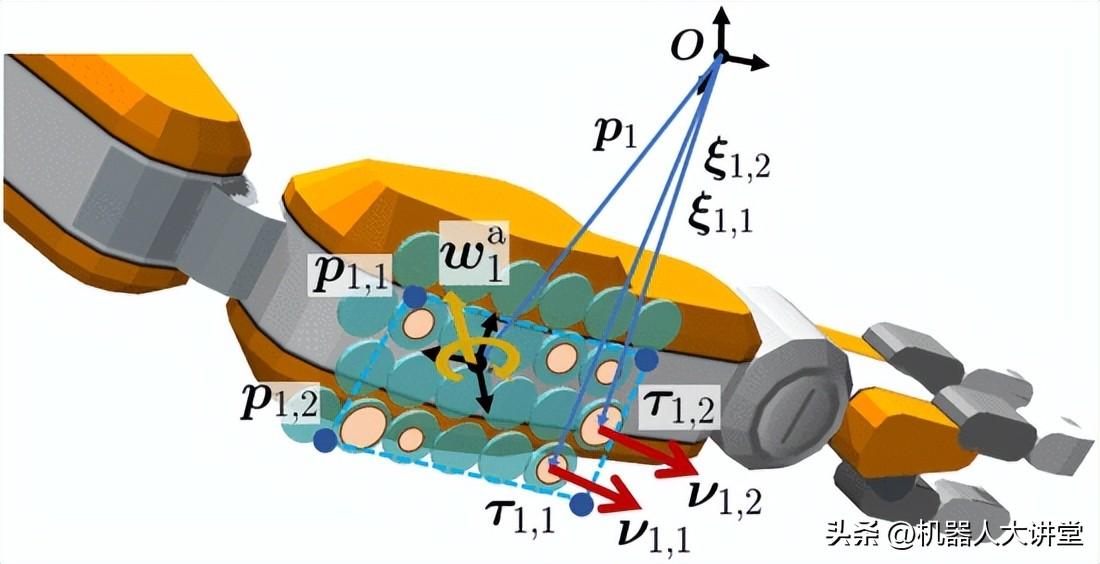
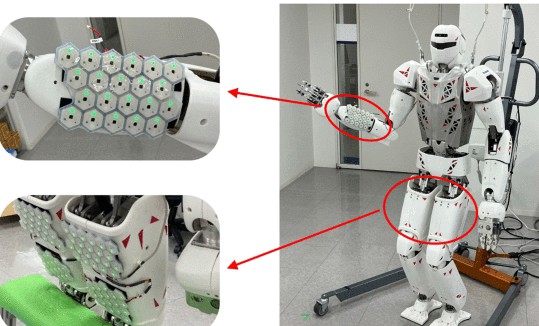
在研究过程中,分布式触觉传感器的开发是关键。这个传感器能够在不改变机器人形状前提下,实时测量机器人与环境的接触情况。这项技术的应用,将为机器人提供更为全面的接触反馈,为后续的运动控制提供重要依据。
四、控制系统设计
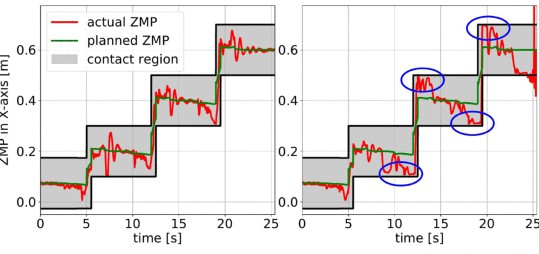
质心运动控制是实现全身多接触运动的基础。通过在机器人质心(Center of Mass,CoM)作用的合力矩(Resultant Wrench), 可以实现对质心的有效控制。研究人员采用了模型预测控制(Model Predictive Control,MPC)的方法,持续监测并调整质心的状态,以确保机器人能够以最优的状态运行。
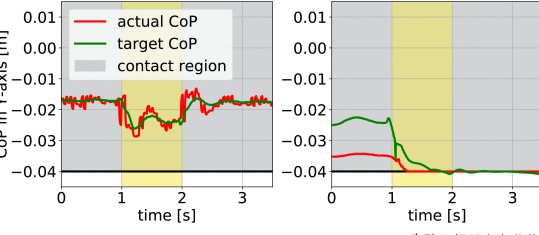
肢体运动控制则是通过对各接触区域的力矩进行分配,从而实现所需的合力矩。这一过程涉及到一个复杂的二次规划问题,通过解决这个问题,研究者能够确保在运动过程中,机器人能够满足各类摩擦约束。此外,添加阻尼控制(Damping Control)使得各接触区域能够在实际应用中保持稳定的接触力矩,从而提高机器人整体的运动稳定性。
分布式触觉传感器的应用,更是打破了以往传统技术的限制。传感器不仅能够测量法向触觉响应,且通过复杂的数据处理,将这些信息转化为可用的接触力矩,从而在运动控制中实现精准的数据反馈。这种实时动态反馈,将为复杂环境下的机器人运动提供了充分的信息支持。
五、实验验证
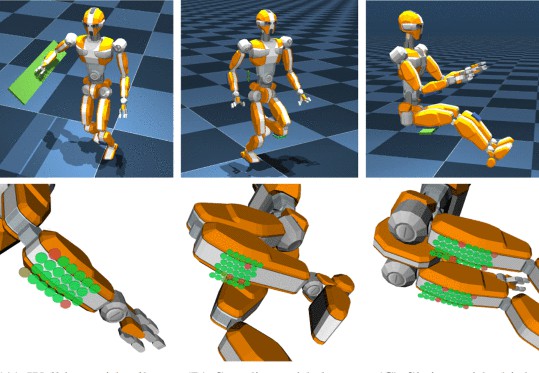
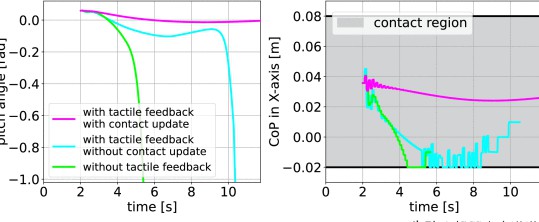
仿真实验是为验证控制方法可行性的重要环节。研究团队在动力学模拟器MuJoCo中进行了一系列与全身多接触运动相关的实验。仿真实验分为几个部分:肘部接触行走、膝部接触站立以及大腿接触坐姿。每种运动的实验结果都显示,采用触觉反馈的机器人相较于未采用反馈的机器人,具有明显的提高,如在倾斜墙面上行走时,能够承受更大的误差,反应更为敏捷。
在真实世界的实验中,实际应用装备有分布式触觉传感器的RHP Kaleido人形机器人,展示了多个全身多接触运动的实例。在实验中,机器人能够在与环境进行物理交互的同时,顺利执行复杂的行走与坐姿运动。这些实验证明,触觉反馈不仅提升了机器人的稳定性,还让其能够更好地适应环境的变化。
为了进一步确保实验的有效性,研究团队还设计了一些应对干扰的场景。例如,在受到干扰力的影响下,让机器人保持平衡、应对动态变化等。这些测试的结果表明,通过对接触区域的不停更新,机器人的稳定性得到了极大提升,足以应对不断变化的环境条件。
六、研究成果与贡献
成果概述在本次研究中,开发的控制方法成功实现了人形机器人的全身多接触运动。这一研究成果不仅推动了机器人技术的发展,更为未来实现更复杂的任务奠定了基础。数据显示,应用这一技术的机器人在多种环境条件下的运动能力得到了显著提升,顽固的平衡问题也得到了有效解决。
该研究的相关论文《Whole-Body Multi-Contact Motion Control for Humanoid Robots Based on Distributed Tactile Sensors》已在《IEEE Robotics and Automation Letters》上发表。这不仅是理论上的成功,更是实际应用的一大步。通过这样的研究,未来人形机器人将在家居、医疗、工业等更为广泛的领域中发挥重要作用。
七、未来展望
不仅仅是研究成果,未来的方向同样充满期待。后续的研究将围绕如何进一步改进分布式触觉传感器的技术,以提升其感知精度和反应速度。比如,研究者们可以探索更先进的材料或传感器布置方式,甚至是将触觉感知与视觉系统结合,以增强机器人的环境适应能力。
行业应用的潜力同样不可小觑。人形机器人能够用于危险环境中的探索,从救援到清理灾后现场,应用场景多样。随着技术的发展,这些机器人未来甚至可以在特定条件下替代人类进行一些高风险的任务。
随著我们不断地探索和应用这些新技术,人形机器人在全身多接触运动方面的挑战将逐渐被突破,未来将是更加美好的智能科技时代。欢迎大家在下方留言讨论,分享您的看法!