
浙大突破!低成本无人机避障神器问世!
浙大最新突破:低成本、通用无人机自适应避障方案揭秘
随着无人机技术的飞速发展,其在物流、航拍、农业等领域的应用日益广泛。无人机在飞行过程中遇到的障碍物避让问题,一直是制约其应用拓展的关键因素之一。近日,浙江大学航空航天学院的研究团队提出了一种全新的无人机自适应避障方案,该方案不仅成本低廉,而且通用性强,有望为无人机技术的进一步普及和应用提供有力支持。
一、引言
无人机避障技术,简而言之,就是无人机在飞行过程中能够自动感知并避开障碍物的能力。这一技术的发展,直接关系到无人机在复杂环境中的安全性和稳定性。传统的无人机避障方案大多依赖复杂的传感器和昂贵的硬件支持,限制了其在中低端市场的应用。而浙江大学的研究团队,通过深入探索非线性自适应学习控制技术,成功开发出一种低成本、通用性强的无人机自适应避障方案。
二、技术背景与现状
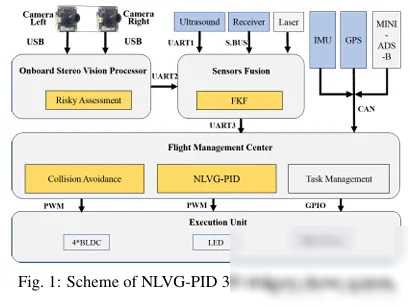
在无人机避障技术领域,PID(比例-积分-微分)控制器是一种常用的控制方法。传统的PID控制器在面对复杂的非线性系统时,往往难以达到理想的控制效果。为了克服这一难题,研究团队提出了一种基于非线性变量增益(NLVG)的PID控制器(NLVG-PID),该控制器能够根据不同大小的误差快速调整控制参数,提高系统的响应速度和稳定性。
与此为了进一步优化NLVG-PID控制器的性能,研究团队还引入了极值搜索(ES)算法。该算法能够在离线状态下,通过模拟不同条件下的系统响应,找到最优的NLVG-PID参数组合。这种自适应学习控制方法,使得无人机能够在不确定条件下实现高效的避障控制。
三、研究内容与方法

在本次研究中,研究团队首先构建了一个无人机模型,并详细分析了其非线性动力学和运动学特性。然后,他们设计了一个NLVG-PID控制器,用于实现对无人机姿态和位置的精确控制。为了验证该控制器的有效性,研究团队在四轴飞行器上进行了模拟实验。
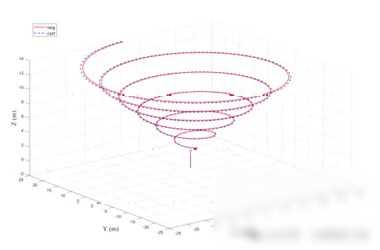
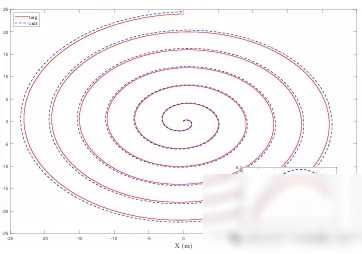
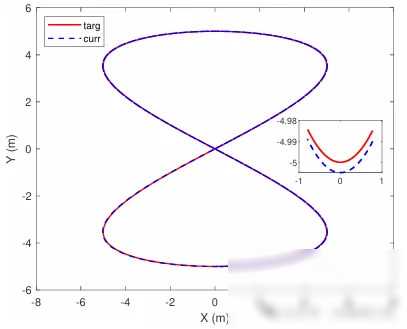
在实验中,研究团队模拟了两种典型的无碰撞轨迹:风暴路径和利萨茹曲线路径。这两种轨迹分别代表了复杂多变和高度曲折的飞行环境,对于无人机的避障能力提出了严峻的挑战。在NLVG-PID控制器的支持下,无人机不仅成功避开了所有障碍物,而且保持了高度的稳定性和精确性。
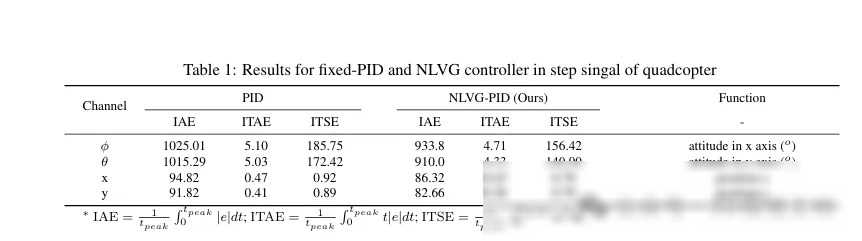
具体来说,在风暴路径跟随实验中,NLVG-PID控制器在姿态角和位置控制方面表现出色。与传统PID控制器相比,NLVG-PID控制器能够更快地收敛到期望轨迹,并且在动态干扰下表现更加稳定。通过对比实验数据,我们可以看到NLVG-PID控制器在姿态角误差和位置误差方面的控制性能均优于传统PID控制器。
在利萨茹曲线跟随实验中,NLVG-PID控制器同样展现出了优秀的控制性能。虽然利萨茹曲线路径更加复杂多变,但NLVG-PID控制器仍然能够保持稳定的控制效果,确保无人机能够精确跟随期望轨迹。这一结果充分证明了NLVG-PID控制器在复杂环境中的强大适应能力。

四、实验结果与分析
通过对比实验数据和分析实验结果,我们可以得出以下结论:

NLVG-PID控制器在无人机避障轨迹控制中具有良好的性能,能够实现对复杂轨迹的精确跟踪和稳定控制。
相比于传统PID控制器,NLVG-PID控制器具有更快的收敛速度和更高的稳定性,能够更好地适应动态干扰和不确定条件。
极值搜索算法在离线状态下能够找到最优的NLVG-PID参数组合,进一步提高控制器的性能。
五、结论与展望
本研究提出了一种基于低成本动态线性优化的自适应学习控制器设计方案,用于解决无人机在不确定条件下的障碍物避让问题。通过数值模拟实验验证,该方案在两种典型的无碰撞轨迹下均表现出色,具有良好的适应性和稳定性。
本研究仍存在一定的局限性。例如,在真实环境中,无人机的避障控制可能受到更多因素的影响,如风速、气流等。因此,未来的研究需要进一步考虑这些因素,并优化控制算法以提高系统的鲁棒性。
此外,随着人工智能技术的不断发展,深度学习、强化学习等方法在无人机避障控制领域的应用也将成为未来的研究热点。我们期待这些新技术能够为无人机技术的发展带来更多创新和突破。
总之,浙江大学的研究团队在无人机自适应避障技术方面取得了重要进展。他们的研究成果不仅为无人机技术的进一步普及和应用提供了有力支持,也为其他相关领域的研究提供了有益的参考和借鉴。我们相信,在不久的将来,无人机将在更多领域展现出其独特的优势和潜力。